
运动研究领域的万用表——光学动作捕捉系统


?光学三维动作捕捉系统,被称为运动研究领域万用表,帮助科研及研发团队提供有力支撑!
浏览完小编整理的,该系统在运动研究领域的广泛应用,你一定也会认可其在运动研究领域的重要作用。部分应用可能超乎你的想象。希望这些脑洞大开的案例,可以给你的研究带来一些启发。

木木西里与度量的故事始于2019年,那个疫情还未来临的秋天。北京度量科技有限公司专注于自主研发、生产制造和销售光学三维动作捕捉系统,致力于为科研机构和企业提供世界顶级的动作捕捉技术服务。双方高层在发展理念上不谋而合,随即确立了多项合作内容。
合作协议签署不久,第一套由木木西里提供并维护的光学动捕系统便在中国矿业大学落地。经过2年的合作、推广与项目实践,木木西里具备扎实的售前咨询、样机借用、安装调试等服务能力。


光学三维动作捕捉系统,采用高性能红外摄像头捕捉反光标识点,采集并生成精准、实时的动作信息,可广泛应用于运动康复、机器人/无人机、机械仿生、虚拟现实、模拟训练、医疗整形、军事军工、电影动画、游戏制作等领域。
规格参数:


中科院自动化所利用光学定位系统实现多智能体编队避障
中科院自动化研究所蒲志强老师团队研究开发出智能无人集群系统。该无人集群系统分为三个子系统,定位子系统、通信子系统与控制子系统,可实现单体无人车和无人机控制、地空协同、集群对战以及无人车、无人机编队表演等功能。

其中定位系统融合使用光学动作捕捉系统与车载的惯性单元进行定位。考虑到捕捉范围,架设了24台Mars2H光学定位相机,其中在5m高度平面布置8台相机,8.5m高度平面布置16台相机,覆盖12m*12m*8.5m的空间。

各个移动机器人及障碍物上放置反光标志点,不同标志点排布形式用于区分机器人个体的ID。通过捕捉移动机器人及障碍物上反光标志点,得到标志点的三维坐标,利用SDK向外实时广播。单个机器人可以接收到本体、邻近移动机器人以及障碍物位置信息,坐标信息精度达到亚毫米级。
动作捕捉系统用于绳索牵引康复机器人轨迹规划与验证

绳索牵引驱动机器人是一种通过绳索代替刚性杆件作为驱动元件的康复机器人。其结构简单,惯性小,机构相对较轻,运动速度也较快,具有较高的负重比率,可实现模块化,具有可重构性,并且制造维护的费用较低。

西安电子科技大学机电工程学院段清娟副教授团队开发的绳索牵引机器人,以两杆系统模拟上下臂,三杆系统模拟上下臂加手,实验过程中需要以人自然走动时的上肢向前摆动角度范围来规划多杆运动轨迹,团队使用了光学三维动作捕捉系统来测量人走路时上肢向前摆动的角度和上肢长度等参数。动作捕捉系统测出实际轨迹,用传感器测出绳索拉力,与计算出的轨迹与拉力理论值对比,验证了优化方法的正确性。
动作捕捉助力重庆理工大学采摘机器人项目研究

在采摘机器人的设计中,有以下这样三个技术难题:物体的定位问题、无人车的控制问题和机械臂动作控制问题。果实表皮脆弱、柔软,不恰当的采摘会使果实表面损坏,因此机械臂末端执行器的精准位置控制,对机械臂能稳定抓取果实尤为重要。

重庆理工大学杨长辉老师实验室的采摘机器人研发团队,在研发过程中使用了光学动捕技术,在实验室内搭设了6台Mars 2H镜头,首先通过给采摘机器人机械臂底部的无人车贴上反光标志点,获得无人车的精确位置坐标,这些位置坐标作为控制系统的反馈信号,对无人车的行进位置等信息进行纠正,从而实现对无人车的精确控制。
随后又对机械臂和果实贴点,捕捉机械臂在与果实进行交互过程中机械臂上点的坐标信息,通过后处理得出机械臂的动作、姿态等信息,尤其是机械臂末端执行器的坐标与姿态,这些信息与果实上点的信息进行比对,数据会被带入一个系统误差评价模型和随机误差评价模型,用于计算机械臂本身定位的误差并进行数据分析。在随机误差存在的情况下,根据数据确定末端构型合适的幅值和相角,从而达到无伤采摘水果的目的。
光学动作捕捉用于锥束CT平台几何位置校正
锥束CT系统简称CBCT,通过发射低能的锥束状射线,射线与传感器同步围绕病人或测试对象旋转一周即可成,其中的算法对系统的要求极高,需严格的几何对准关系。

针对这一关键问题,浙江大学转化医学院的牛田野教授团队使用基于旋转机架的小动物锥束CT系统有效地开展了动物实验。在这一实验中,对锥束CT平台进行几何位置的定位校正是其中相当重要的一环。锥束CT系统主要由射线源、工件转台和面阵探测器组成,系统几何参数误差也主要来自这三部分的安装偏差。

由于对定位校正有着高精度的要求,他们选择了三维光学动作捕捉系统作为定位工具。实验团队将空间坐标原点和坐标系指定至CT平台上的特定位置和方向,并在CT平台的射线源、工件转台和面阵探测器上布置Marker点以实时获取坐标数据,通过被测位置的数据校对,来进行锥束CT平台的校正。
让机器学会“察颜观色”:人体行为识别

人体的行为是多变而复杂的,具有任何机械都无法做到的柔韧性和多样性,针对人体行为分析和识别的技术是人工智能和模式识别领域的新兴研究方向。

吉林广播电视大学在针对学生上课过程中各种行为与动作的研究中,采用了光学三维动作捕捉系统。
通过在身体关键节点处贴点,如手腕、小臂、手肘、大臂、头部等,重建出人体的三维运动模型。研究中采集大量特征数据,根据特征值来逆推学生上课时的动作。将捕捉到的数据实时发送到编译好的程序中,程序会识别到这些特征值的变化,然后判断当前动作,并作出对应提示。
例如当学生上课有举手的行为时,动作捕捉系统准确捕捉到这一动作,将其特征发送到程序中,程序检测到特征值的变化,判断为举手,并通过灯光等方式来提醒老师学生有举手行为。
效率提升4倍,动作捕捉助力科技冬奥水立方变身冰立方

2008年北京奥运会的游泳场馆水立方正在进行一场史无前例的“变身”,这里将作为2022年北京冬奥会冰壶项目的主场馆,再次见证运动员们的荣光。冰壶赛道对冰面要求极为严苛,即使1mm的平整偏差都会影响冰壶滑行的轨迹,从而改变比赛结果,这就要求保证冰面必须平整。要形成平整的冰面,首先要求钢架上的所有预制板保持在同一平面上。

科技冬奥水立方冬-夏场景转换项目课题组针对以上问题,开发了调平动态监测技术。课题组开发的调平动态监测技术基于光学三维动作捕捉系统,利用架设在场地四周的红外光学镜头,捕捉放在预制板上的反光标志点,从而实时确定预制板的位置。系统的定位精度可以达到亚毫米级,满足预制板调平精度要求。
传统的调平方式是使用水准仪等设备完成,该冰立方项目共有1568块预制混凝土板,此前利用水准仪进行调平,工人每调平一块板涉及周边8块板,需要跑点测量,调平耗费大量的测量时间。去年完成整个结构支撑结构用了45天,今年搭建中使用调平动态监测等技术,完工仅用了10天时间,搭建效率提高了4倍!
内侧髌股韧带修复技术中动作捕捉的应用

内侧髌股复合体是髌股关节的主要被动稳定系统,它包含内侧髌股韧带(MPFL)、内侧髌胫韧带和股内侧肌三个部分。医学研究表明,MPFL在稳定髌骨侧方移位方面起到了决定性作用。使用缝合带增强技术使MPFL恢复正常功能存在诸多优势,但是其可靠性有待验证。
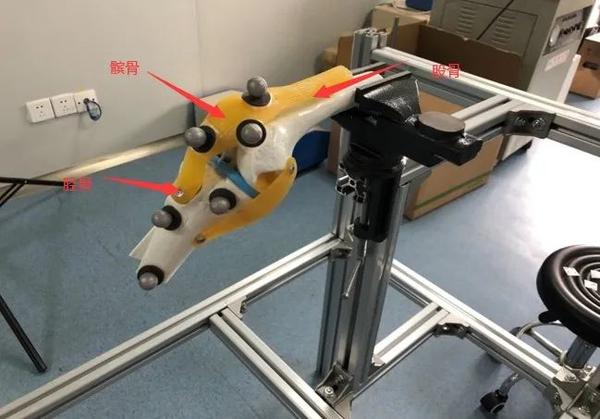
深圳市第二人民医院的黄勇医生选取多个膝关节解剖标本,在每个试验条件下,进行3个完整的伸直和屈曲周期。第一个周期作为预处理,记录下后续周期的平均值进行比较。测量膝关节6个不同屈曲等级:0°、10°、20°、30°、60°和90°。在髌骨移位和髌骨倾斜值的测量中,医院使用了NOKOV光学动作捕捉设备。
试验中,股骨水平固定,将胫骨固定在3D支撑臂上,胫骨可自由旋转。反光marker贴在股骨、胫骨与髌骨表面。按3种不同的预负荷(2 N、5 N和10 N)加载股四头肌和髂胫束,测量不同修复技术下的髌骨移位与髌骨倾斜值。得到所有标本的结果参数后,对各标本在不同屈曲角度下进行配对t检验,可确定不同负荷下缝合带增强与肌腱移植重建MPFL之间的差异。

精度亚毫米级!无人机编队定位技术解读

多旋翼无人机控制算法测试平台

蛇形机器人高空电缆巡检

视觉位姿检测的精度验证

焊接机器人本体标定中动作捕捉的应用

如果有更多光学动作捕捉系统相关的问题讨论,我们也可以私下交流,沟通联系1538
0766380(微同备注:光学动作捕捉系统),咨询产品经理Theo。大家也可以关注木木西里的微信公号,上面会有各类科研仪器的相关介绍,很多产品都有对应的产品经理,除了一些基础的仪器设备参数,还可以交流使用过程中遇到的问题哦~
(内容来源:木木西里;其他案例参考来源:度量)
文末说句正事
科学研究离不开精准的实验数据,高品质的科研仪器是降低实验误差的基础!木木西里专注服务科研六年,汇集国内外高品质仪器设备、试剂耗材,为您量身定制实验室平台搭建方案,是您科研路上的贴心小助手!
特别声明:本文发布仅仅出于传播信息需要,并不代表本公共号观点;如其他媒体、网站或个人从本公众号转载使用,请向原作者申请,并自负版权等法律责任。