
西班牙知名学者采用BOB生物力学分析软件包与Rokoko Smartuit Pro动捕设备对OTP警察职业风险预防物理干预技术成功地进行了生物力学参数分析!
作者:José C. Vera-Jiménez,1,
何塞·维拉·希门尼斯
加的斯市警察局,警察技术区,加的斯议会公共安全学校,11010加的斯,西班牙
* Felipe L. Meléndez-Sánchez,2
费利佩·L·梅伦德斯-桑切斯
国家远程教育大学(UNED)法学院刑法和犯罪学系,Calle Obispo Trejo 2号,28040马德里,西班牙
José A. álvarez,3 & Jesús Ayuso3
何塞阿·阿尔瓦雷斯&耶稣·阿尤索
加的斯大学INBIO理学院物理化学系,邮编11510,西班牙,波多黎各
编辑:Michael D. Freeman, Academic Editor
摘要:
(1) 背景:一组与预防职业风险的风险评估方法相关的人体工程学参数,如REBA或NIOSH,已经通过惯性传感器进行了测量,这些惯性传感器可以捕捉人体的运动。这些方法基于许多姿势和动态参数进行评估。在警察身体干预技术的情况下,躯干、腿部、手臂、前臂和手腕角度、L5骨盆连接处的关节接触力和剪切力、不对称性(角度和因素)和肌肉力量是需要考虑的更相关的参数。
(2) 方法:通过配备19个惯性传感器的运动捕捉套装收集数据。大量数据和三维图由专门用于人体工程学分析的强大软件包管理。警方使用的物理干预技术是OTP。
(3) 结果:分析了传统警察身体干预技术中的五个人体工程学参数。记录了REBA评分和人体工程学指标,并与文献中的一些预防风险限值进行了讨论。(4) 结论:使用惯性传感器捕捉OTP中的运动为职业风险研究提供了一个新的、非常有效的观点。
关键词:人体工程学、职业风险预防、警察物理干预、武力使用、作战战术程序、动作捕捉技术
1.引言
近年来,基于惯性传感器的方法学在医学应用中的使用有所增加[1]。因此,例如,使用可穿戴传感器平台分析人体运动的惯性测量单元(IMU)[2,3]已经成为康复或预防伤害的广泛使用的工具。
基于IMU的不同运动的生物力学研究也有广泛的参考文献。例如,Van der Kruk等人[4]进行的汇编值得一提,因为他们对基于IMU的测量精度进行了深入分析,以便将其应用于快速移动的活动,如体育活动。然而,这些研究中并没有很多集中于警察或安全部队的物理干预,这是本研究的范围。
在我们发现的关于警察干预的技术出版物中,Mavor[5]的一项研究基于光学运动和惯性测量单元传感器(IMU),研究了在进行类似军事运动时捕获的载荷运输对军事或国防部队的影响。在这项研究中,通过跑步、步行、跪姿和俯卧姿势等运动来确定全身关节角度等几个参数。根据这些数据,IMU系统被证明适合捕捉和重建全身运动及其在军事活动中的可变性。然而,所涵盖的运动相当简单,需要对更广泛的物理干预技术进行更详细的分析,例如上身运动。
对警察身体干预期间进行的最重要的动作进行生物特征分析,对于风险预防研究的发展非常有意义。
本论文旨在为减少与警察身体干预技术相关的职业风险奠定基础。它将特别关注一种作战战术程序(OTP)[6],该程序由警察根据警察培训学院教授的方法和技术控制对手。OTP与传统程序不同,传统程序基于武术和格斗运动,其目的是固定对手。这些类型的干预措施涉及对手和警察受伤的高风险。相反,OTP避免击中任何关键区域,并对对手造成严重伤害。
我们的研究基于人体工程学评估来预防。因此,必须准确确定某些类型的生物特征参数,如膝盖、臀部或脊柱的正面或矢状面角度,以进行正确评估。从这个意义上讲,基于IMU的3D运动捕捉工具在确定这些参数时已经证明了其精度水平[7]。
Rokoko 19 IMU套装已被证明是一种可靠的跨平台(iOS、MS Windows等)选项。此外,还使用了Shippen[8]开发的人体生物力学(BoB)建模软件包。
这种硬件和软件组合已被证明是分析人体生物力学人体工程学因素的一种强大设备,因此它们已被用于计算关节的运动范围、轨迹、关节扭矩、肌肉力、地面反作用力和关节接触力。
当前已经开发了许多不同的人体工程学评估方法,如REBA[9,10]、NIOSH[11]、RULA[12]、OWAS[13]、LEST[14]、JSI[15]、NMQ-E[16]、Snook和Ciriello表[17]、OCRA[18]、OCRA检查表[19]和Chaffin生物力学模型[20]。其中,本研究将考虑REBA方法(作为评估姿势负荷的方法)和NIOSH方法(旨在评估体重处理)的主要特征和参数。这两种方法将成为我们分析作战战术程序或OTP的警察物理干预技术(PIT)中的人机工程学的基础(Vera Jiménez等人,2020)[6]。
可以认为,作为人体工程学评估方法,REBA和NIOSH不是评估物理干预技术的最合适方法。然而,尽管它们存在不可否认的缺陷,但它们评估的一些参数对于本研究而言可能非常有用,特别有趣。
西班牙劳动和社会经济部下属的国家工作安全、健康和福利研究所收集了REBA和NIOSH方法作为预防技术注释(NTP是其西班牙语首字母缩写)。这些非关税壁垒是良好做法的指南和建议,除非纳入现行法规中,否则不是强制性的。在考虑特定NTP中所含建议的适用性时,应考虑其发布日期。
1.1.REBA(快速全身评估)方法中的相关参数
REBA方法由Nogareda[10]设计,包含在NTP 601中,旨在评估与人体解剖几何结构相关的一系列参数,如四肢和身体其他部分的角度和相对位置,根据这些参数,根据这些几何参数的特定间隔和限值,分配一系列分数。
通过应用该方法,评估上肢、下肢、躯干和颈部的姿势,同时区分身体的右侧和左侧。因此,身体的每一部分都被分配了一个分数,随着其位置远离其最放松的姿势,分数会更高。REBA方法还考虑了握力的类型或形式,并且握力越强,得分越高。
REBA总分的最大值为15分,包括五个数值范围。根据不同的风险水平,建立风险指数和相应的建议或干预措施。风险指数可以从可忽略到非常高的风险,如下:可忽略的风险,不建议采取任何行动;低风险,需要考虑一些变化;中等风险,需要进行一些变更;高风险,需要尽快进行变更;以及非常高的风险,需要立即实施变更。
在警察身体干预技术的情况下,躯干(表1)、腿(表2)、手臂(表3)、前臂(表4)和手腕角度(表5)是更相关的参数,如下图所示。






1.2.NIOSH方法中的相关参数
本研究将主要关注与腰痛或背部问题相关的风险;已经认为,基于NIOSH提升方程[11]的方法将是最合适的方法。因此,基于NIOSH方程,我们确定了L5骨盆交界处的压缩力极限,以牛顿(N)和不对称角(A)为单位。
不对称角和不对称因子
不对称角(A)是在提升或装载任务期间工人躯干扭转/弯曲的指标。因此,它表示相对于人体矢状面的非对称运动。
根据NIOSH的说法,需要扭转躯干的提升是受到惩罚的,也就是说,应该避免不对称的提升。为此,使用公式计算不对称系数(AM):AM=1? (0.0032 ? A) ,其中A是旋转角度(以六度为单位),如图1和图2所示。


当不存在不对称性时,AM因子取值为1,其值随着角度的增加而减小。还应考虑当A>135°时,AM值为0(图1)。
后者是最坏情况,不建议举重(RWL=0表示)。
在最极端的情况下,受矢状不平衡影响的人通常会出现步态模式、关节活动范围以及下肢力量和肌肉工作能力的显著变化[21]。
矢状不平衡与下肢所有主要肌肉群(臀中肌、腰肌、腘绳肌等)的激活力降低显著相关,股四头肌除外。
此外,González-Míguez[21]的研究表明,通过三维运动分析,使用本研究中使用的系统,可以避免常规射线诊断检测到的通常低估。
1.3.L5骨盆连接处的关节接触力
要考虑的最相关的压缩力是作用在脊柱椎间盘上的力,包括体重和负荷行为。根据NIOSH[11]的标准,L5骨盆交界处的3400 N(图2)已被确定为腰痛风险的压缩力极限。
1.4.L5骨盆连接处的剪力
剪切力是导致椎骨相对于紧邻的下椎骨或上椎骨平行滑动或移位的力。因此,力与压缩力垂直。当人体躯干做出拉力和/或推力时,通常会产生更大的力(图3)。

根据一项关于腰痛最常见原因的广泛生物动力学工程研究[22],这些力的通常范围在600至3200 N之间,平均值为1700 N。本文得出结论,在低频任务中,绝对力高达1000 N(≤100负载/天)对于90%的工作年龄人口来说是可以接受的,而在更高频率的任务(大约1000负载/天左右)中,700 N的绝对力是可以忍受的。
显然,所有这些动态参数都将强烈依赖于执行每种身体干预技术的警官的体重、身高、年龄和性别。
1.5.总肌肉力量
肌肉力量是另一个被认为是本研究感兴趣的动态参数。使用相同的生物力学计算软件Bob检索相应的数据。肌肉力量的计算是基于在给定时间内完成特定工作所用的能量,用瓦特表示。
多年来,这一参数经常在运动训练中进行分析。专门用于某些运动,如网球、棒球或高尔夫[23,24,25,26]。然而,它也是某些工作中的研究对象,其中肌肉力量与一系列典型的疾病有关。从这个意义上讲,国家科学研究所(L‘Assicurazione contro gli infortuni sul lavoro)[26]开展了一项关于欧盟建筑行业工人因执行会使工人处于危险中的任务(如手动搬运重物、强迫姿势等)而患上肌肉骨骼疾病(MSD)的研究。
在这项研究中,最常见的损伤包括尺侧副韧带(UCL)撕裂、屈肌旋前肌腱炎或撕裂、尺神经炎、后部撞击、小头肌分离软骨炎和伸肌腱病,即腱病是最常见的伤害。
本研究的主要目的之一是基于当前的生物力学知识,概述上肢(肩部、肘部和手腕)的损伤及其预防,负荷和肌肉运动应该有助于更好地理解损伤的病理生理学。
2.材料和方法
这是一个生物力学建模软件包,使用传感器提供的与位置、速度和加速度相对应的数据来确定线性速度和加速度,角速度和加速度(来自肌肉伸展或旋转),以及其他动态测量,例如肌肉张力/压缩力、能量和它们施加的功率。所有这些数据对于本研究的目的都是有价值的。BoB还提供了三维图形和用户界面,可以在其中显示分析结果(图4)。

该软件提供了多种选项,用于注册REBA分析的相关值。因此,对于握把质量,有以下四种选择:合适的手柄和中等功率握把(这最适合OTP);可接受但不理想的手柄;不可接受,但可能有扶手;没有把手,笨拙或不安全。它还提供了“活动程度?”的四个选项如下:一个或多个身体部位保持静止超过1分钟;每分钟重复4次以上的小范围动作;导致姿势快速变化的动作(这最适合OTP);以上都不是。
2.2.Rokoko Smartsuit Pro
该设备由一套装备19个主动(三轴加速度计、陀螺仪和地磁)无线惯性传感器的套装组成,这些传感器可以确定人体内的位置、速度、加速度和磁场。它还具有一个特定的软件应用程序,在屏幕上显示身体位置作为化身(图5)。传感器每秒可记录多达100次数据。

2.3.OTP警察物理干预技术
警察物理干预技术基于作战战术程序(OTP),包括一系列物理干预技术(PIT),这些物理干预技术使用诸如阻挡、转移和抓住上肢和下肢等防御机制,以避免击中脆弱和重要区域,从而最大程度地降低严重损害的风险。
事实上,OTP程序中描述的技术依赖于施加可控的疼痛,例如,击打三头肌肌腱或股四头肌可能会疼痛到足以完全阻挡和控制对手。这些程序不仅避免了对手,也避免了警察的严重伤害[6]。
2.4.研究合作者
当两名穿着传感服的专业男性警官执行经典物理干预技术的整个过程时,记录所有上述生物力学参数的测量值。
担任警察的女性身高1.65米,体重62公斤;担任对手的男性身高1.80米,体重80公斤。
3.结果和讨论
由于采用这种基于无线传感器的新捕获技术进行的生物力学分析,同时确定了大量生物特征参数。这项基于人为因素的人体工程学研究应该可以让我们确定受伤的概率。
软件应用程序允许使用与特定OTP中特定时刻的人体位置相对应的化身。图6显示了一名女警官面对对手进行OTP的四个瞬间。警官正在对一名市民应用禁固技术。
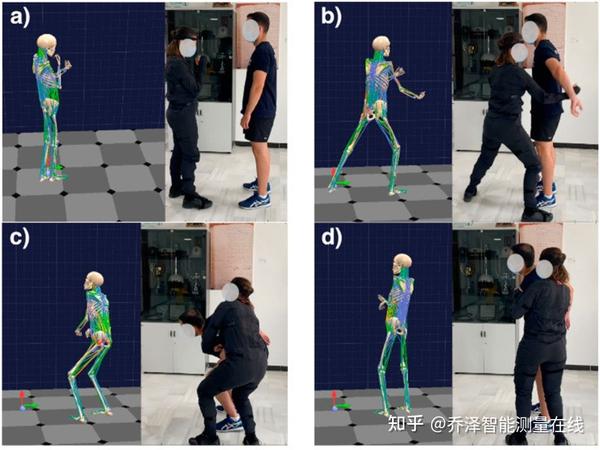
图6a显示了该过程的初始时刻,即针对攻击者的安全位置。左边的图像显示了与警官姿势相对应的解剖化身。
同一图中的图6b显示了警察向前走,用最靠近她移动位置一侧的腿,同时用前臂(从同一侧)抓住对手的肘部。
在图6c的图像中,对手被拖到军官的臀部,这是他被禁固之前的一步。最后,图6d显示了对手如何被禁固在垂直位置,在那里他应该完全处于控制之下。
在整个OTP实施过程中,传感器记录生物力学参数,然后将其转换为一组有用的分数,由REBA或NIOSH用于评估情况,从而防止任何可能的职业风险。
3.1评估REBA
图7显示了本研究实施的OTP中REBA分数的演变。REBA值每秒注册100次,图6中的4个快照标记为(a)到(d)。从图中可以看出,本研究选择的OTP分数未达到“极高风险”水平,而其平均分数在“中等风险”范围内。这是一个不寻常的分数,仅对应于这个特定的案例。

3.2.不对称
图8、图9、图10和图11分别显示了蓝色曲线,分别对应于不对称角度和系数)、关节接触力、L5骨盆连接处的剪切力和肌肉力量。
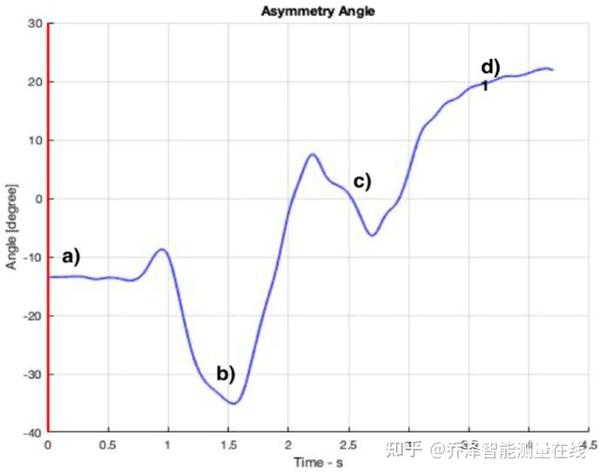



不对称角(图8)的变化范围为?35°和25°时,扭转从干预的第一秒开始,不对称系数减少不超过提升重量的15%。
3.3.联合接触力
如图9所示,L5骨盆接合处的关节接触力或压缩力变化非常快。当警察迫使对手弯腰时,其最大值(2146 N)达到(图9c)。
本文中特别感兴趣的参数之一是L5椎骨和骨盆之间的节段上的剪切力,因为在先前的研究[8]中,据报道,可以观察到专家和新手之间的明显差异,从风险预防的角度来看,这一点值得注意。
当躯干向前弯曲时,由于重力作用于上身,通常会产生更大的力,但在一些涉及推或拉物体的工作中,这种力也会非常重要[27]。剪切力通常被定义为平行于特定感兴趣节段内椎间盘确定的平面作用的力[28]。
3.4.剪切力
从图10中可以看出,在整个过渡过程中,L5骨盆关节处的剪切力是中等的(不那么高),直到军官向前迈出一步。然后,当警察向前倾向对手时,从图10b增加到图10c。在本示例中,剪切力达到的最大值(418 N)发生在1.6秒。
3.5.肌肉力量
从职业风险的角度来看,另一个非常重要的参数是警察施加的肌肉力量。图11以正值和负值表示总肌肉力量,其中正值被分配给偏心运动(即,肌肉力量被施加在肌肉运动的相反方向)。相反,同心运动与负值相关。如果考虑功率绝对值(每单位时间消耗的能量速率),则最高的肌肉功率消耗发生在图10c和图11b的步骤之间。
4.结论
惯性测量单元(IMU)传感器用于捕捉运动,为OTP职业风险研究提供了一种新的高效方法。
通过这项研究,基于IMU的3D运动捕捉工具已证明其适用于测量REBA和NISOH评估方法中使用的生物特征参数,例如躯干正面和矢状面角度;此外,还确定了其他动态参数,例如L5骨盆连接处的关节接触力和剪切力、不对称性(角度和系数)以及肌肉力量。
IMU技术也易于在实验室环境外使用。
总之,我们得出结论,这些是可以用来确定其他物理干预技术风险水平的合适工具。
5.专利
Vera Jiménez,J.C。;2017; 多功能保护器,适用于携带警察使用的防御装置和其他配件,以及使用防御阻挡技术。雇佣方法(谷歌翻译的机器翻译,不具有法律约束力)ES2615602A1(B2)?2017年6月7日。
缩写词汇解释:
| BoB | Biomechanics of Body |
| IMU | Inertial Measurement Units |
| JSI | Job Strain Index |
| LEST | Laboratoire d’Economie et Sociologie du Travail (Labor Economics and Sociology Laboratory) |
| NIOSH | National Institute for Occupational Safety and Health |
| NMQ-E | Nordic Musculoskeletal Questionnaire (Extended) |
| OCRA | OCcupational Repetitive Action |
| OTP | operational tactical procedure |
| OWAS | Ovako Working Analysis System |
| PIT | Physical Intervention Techniques |
| REBA | Rapid Entire Body Assessment |
| RULA | Rappid Upper Limb Disorders |
参考:
1. Laidig D., Schauer T., Seel T. Exploiting kinematic constraints to compensate magnetic disturbances when calculating joint angles of approximate hinge joints from orientation estimates of inertial sensors; Proceedings of the International Conference on Rehabilitation Robotics (ICORR); London, UK. 17–20 July 2017; pp. 971–976. [PubMed] [CrossRef] [Google Scholar]
2. Kok M., Hol J.D., Sch?n T.B. Using inertial sensors for position and orientation estimation. Found. Trends Signal Process. 2017;11:1–153. doi: 10.1561/2000000094. [CrossRef] [Google Scholar]
3. Weygers I., Kok M., De Vroey H., Verbeerst T., Versteyhe M., Hallez H., Claeys K. Drift-free inertial sensor-based joint kinematics for long-term arbitrary movements. IEEE Sens. J. 2020;20:7969–7979. doi: 10.1109/JSEN.2020.2982459. [CrossRef] [Google Scholar]
4. Van der Kruk E., Reijne M.M. Accuracy of human motion capture systems for sport applications; state-of-the-art review. Eur. J. Sport Sci. 2018;18:806–819. doi: 10.1080/17461391.2018.1463397. [PubMed] [CrossRef] [Google Scholar]
5. Mavor M.P., Ross G.B., Clouthier A.L., Karakolis T., Graham R.B. Validation of an IMU suit for military-based tasks. Sensors. 2020;20:4280. doi: 10.3390/s20154280. [PMC free article] [PubMed] [CrossRef] [Google Scholar]
6. Vera-Jiménez J.C., Lorente J.A., González-Herrera L., álvarez J.A., Ferreiro-González M., Ayuso J. A legal and forensic medicine approach to police physical intervention techniques in high-risk situations. Int. J. Environ. Res. Public Health. 2020;17:2809. doi: 10.3390/ijerph17082809. [PMC free article] [PubMed] [CrossRef] [Google Scholar]
7. Tak I., Wiertz W.-P., Barendrecht M., Langhout R. Validity of a new 3-D Motion analysis tool for the assessment of knee, hip and spine joint angles during the single leg squat. Sensors. 2020;20:4539. doi: 10.3390/s20164539. [PMC free article] [PubMed] [CrossRef] [Google Scholar]
8. Shippen J., May B. BoB—Biomechanics in MATLAB; Proceedings of the 11th International Conference Biomdlore; Druskininkai, Lituania. 20–23 October 2016; [CrossRef] [Google Scholar]
9. Hita-Gutiérrez M., Gómez-Galán M., Díaz-Pérez M., Callejón-Ferre J.A. An overview of REBA method applications in the world. Int. J. Environ. Res. Public Health. 2020;17:2635. doi: 10.3390/ijerph17082635. [PMC free article] [PubMed] [CrossRef] [Google Scholar]
10. Cuixart S.N. NTP 601: Evaluación de las Condiciones de Trabajo: Carga Postural. Método REBA (Rapid Entire Body Assessment). Instituto Nacional de Seguridad e Higiene en el Trabajo (INSHT) 2001. [(accessed on 29 March 2022)]. Available online: https://www.studocu.com/ca-es/document/universitat-oberta-de-catalunya/prevencion-de-riesgos-derivados-de-la-organizacion-y-la-carga-de-trabajo/ntp-601-evaluacion-de-las-condiciones-de-trabajo-carga-postural-metodo-reba-rapid-entire-body-assessment/20730183
11. Work Practices Guide for Manual Lifting. National Institute for Occupational Safety and Health; Cincinnaty, OH, USA: 2017. NIOSH Technical Report 1981, n° 81–122. [Google Scholar]
12. Lim C.-M., Jung M.-C., Kong Y.-K. Evaluation of upper-limb body postures based on the effects of back and shoulder flexion angles on subjective discomfort ratings, heart rates and muscle activities. Ergonomics. 2011;54:849–857. doi: 10.1080/00140139.2011.600777. [PubMed] [CrossRef] [Google Scholar]
13. Karhu O., H?rk?nen R., Sorvali P., Veps?l?inen P. Observing working postures in industry: Examples of OWAS application. Appl. Ergon. 1981;12:13–17. doi: 10.1016/0003-6870(81)90088-0. [PubMed] [CrossRef] [Google Scholar]
14. Guélaud F., Roustang G., Beauchessne M., Gautrat J. Pour une Analyse des Conditions du Travail Ouvrier dans L’entreprise. LEST Methode. Laboratoire d’économie et de Sociologie de travail; Aix en Provence, France: 1975. [Google Scholar]
15. Restuputri D.R., Masudin I., Putri A.R.C. The comparison of ergonomic risk assessment results using job strain index and OCRA methods. IOP Conf. Ser. Mater. Sci. Eng. 2020;821:012029. doi: 10.1088/1757-899X/821/1/012029. [CrossRef] [Google Scholar]
16. Dawson A.P., Steele E.J., WHodges P.W.P., Stewart S. Development and Test–Retest Reliability of an Extended Version of the Nordic Musculoskeletal Questionnaire (NMQ-E): A screening instrument for musculoskeletal pain. J. Pain. 2009;10:517–526. doi: 10.1016/j.jpain.2008.11.008. [PubMed] [CrossRef] [Google Scholar]
17. Snook S.H., Ciriello V.M. The design of manual handling tasks: Revised tables of maximum acceptable weights and forces. Ergonomics. 1991;34:1197–1213. doi: 10.1080/00140139108964855. [PubMed] [CrossRef] [Google Scholar]
18. Occhipinti E. OCRA: A concise index for the assessment of exposure to repetitive movements of the upper limbs. Ergonomics. 1998;41:1290–1311. doi: 10.1080/001401398186315. [PubMed] [CrossRef] [Google Scholar]
19. Rhén I.M., Forsman M. Inter-and intra-rater reliability of the OCRA checklist method in video-recorded manual work tasks. Appl. Ergon. 2020;84:103025. doi: 10.1016/j.apergo.2019.103025. [PubMed] [CrossRef] [Google Scholar]
20. Bean J.C., Chaffin D.B., Schultz A.B. Biomechanical model calculation of muscle contraction forces: A double linear programming method. J. Biomech. 1988;21:59–66. doi: 10.1016/0021-9290(88)90192-3. [PubMed] [CrossRef] [Google Scholar]
21. González-Míguez P. Ph.D. Thesis. Universitat Autònoma de Barcelona; Barcelona, Spain: 2017. Biomechanical Analysis of Gait by Means of an Analytical Model of Inverse Dynamics in Patients with Alteration of the Sagittal Balance of the Spine. [Google Scholar]
22. Gallagher S., Marras W.S. Tolerance of the lumbar spine to shear; A review and recommended exposure limits. Clin. Biomech. 2012;27:973–978. doi: 10.1016/j.clinbiomech.2012.08.009. [PubMed] [CrossRef] [Google Scholar]
23. Davidson P.A., Pink M., Perry J., Jobe F.W. Functional anatomy of flexor pronator muscle group in relation to the MCL of the elbow. Am. J. Sports Med. 1995;23:245–250. doi: 10.1177/036354659502300220. [PubMed] [CrossRef] [Google Scholar]
24. Pluim B.M., Staal J.B., Windler G.E., Jayanthi N. Tennis injuries: Occurrence, aetiology, and prevention. Br. J. Sports Med. 2006;40:415–423. doi: 10.1136/bjsm.2005.023184. [PMC free article] [PubMed] [CrossRef] [Google Scholar]
25. Eygendaal D., Rahussen F.T.G., Diercks R.L. Biomechanics of the elbow joint in tennis players and relation to pathology. Br. J. Sports Med. 2017;4:820–823. doi: 10.1136/bjsm.2007.038307. [PMC free article] [PubMed] [CrossRef] [Google Scholar]
26. Campo G., Cegolon L., De Merich D., Fedeli U., Pellicci M., Heymann W.C., Pavanello S., Guglielmi A., Mastrangelo G. The Italian national surveillance system for occupational injuries: Conceptual framework and fatal outcomes, 2002–2016. Int. J. Environ. Res. Public Health. 2020;17:7631. doi: 10.3390/ijerph17207631. [PMC free article] [PubMed] [CrossRef] [Google Scholar]
27. Knapik G.G., Marras W.S. Spine loading at different lumbar levels during pushing and pulling. Ergonomics. 2009;52:60–70. doi: 10.1080/00140130802480828. [PubMed] [CrossRef] [Google Scholar]
28. Adams M.A., Bogduk N., Burton K., Dolan P. The Biomechanics of Back Pain. 2nd ed. Churchill Livingstone; Edinburgh, UK: 2006. [Google Scholar]